 清尘
清尘
Stanford CS336 | Language Modeling from Scratch | 02
前言
课程链接:Language Modeling from Scratch
第二课是 Pytorch,Resource Accounting
Overview of this lecture:
- We will discuss all the primitives needed to train a model.
- We will go bottom-up from tensors to models to optimizers to the training loop.
- We will pay close attention to efficiency (use of resources).
pay close attention to 关注;抓紧
In particular, we will account for two types of resources:
- Memory (GB)
- Compute (
FLOPs)
napkin math
# Question:
# How long would it take to train a 70B parameter model on 15T tokens on 1024 H100s?
total_flops = 6 * 70e9 * 15e12 # @inspect total_flops
assert h100_flop_per_sec == 1979e12 / 2
mfu = 0.5
flops_per_day = h100_flop_per_sec * mfu * 1024 * 60 * 60 * 24 # @inspect flops_per_day
days = total_flops / flops_per_day # @inspect days
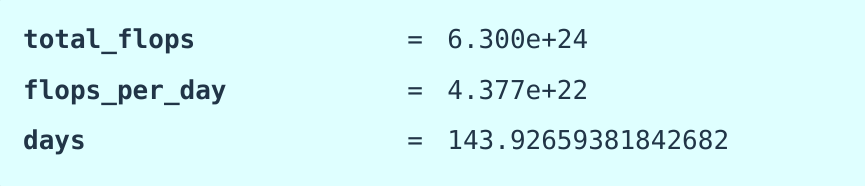
total_flops这个公式来源于一个经典经验公式:
训练一个 Transformer 模型,大约需要
6 × 模型参数数量 × token 数量的浮点运算(FLOPs)
为什么是 6?
这个是经验值,参考自 OpenAI 的 GPT 和 Google 的 PaLM 等论文,它考虑了:
- 前向传播
- 反向传播
- 梯度更新
- 优化器状态维护(比如 Adam)
- 冗余操作(比如 dropout、layer norm)
h100_flop_per_sec
H100 FP8 理论最大吞吐量为约 1979 TFLOPs(每秒 $1.979×10^{15}$)
但是,这里除以 2 是为了得到更现实的 FP16/BF16 性能。在实际训练中我们通常使用混合精度(BF16/FP16)
MFU(Model Flop Utilization)
MFU(Model Flop Utilization)是一个效率指标,代表:
实际模型训练时使用的
FLOPs/ 理论可用的FLOPs
理想情况下 MFU = 1(完美利用),但实际中受限于:
- 通信延迟(特别是大模型并行)
- 内存带宽瓶颈
- 计算空闲
# Question:
# What's the largest model that can you can train on 8 H100s using AdamW (naively)?
h100_bytes = 80e9 # 每张 H100 有 80 GB = 80 × 10⁹ 字节
bytes_per_parameter = 4 + 4 + (4 + 4) # parameters, gradients, optimizer state
num_parameters = (h100_bytes * 8) / bytes_per_parameter
# Caveat 1: we are naively using float32 for parameters and gradients.
# We could also use bf16 for parameters and gradients (2 + 2) and keep an extra float32 copy of the parameters (4). This doesn't save memory, but is faster. [Rajbhandari+ 2019]
# parameters, gradients 用 bf16(2 + 2 字节),再保存一份 float32 copy(4 字节),内存不省但计算更快。
# Caveat 2: activations are not accounted for (depends on batch size and sequence length).
# 激活值的内存占用跟 batch size、序列长度和层数强相关,但这里没考虑。
bytes_per_parameter
| 项目 | 意义 | 所占字节(float32) |
|---|---|---|
4 |
参数本身(weights) | 4 字节 |
4 |
梯度(gradients) | 4 字节 |
4 |
AdamW 的一阶动量(m) |
4 字节 |
4 |
AdamW 的二阶动量(v) |
4 字节 |
| 合计 | 每个参数所需内存总量 | 16 字节 |
这是 float32 情况下常见的“训练态显存需求”估算。
如果用 float32 精度 和 AdamW 优化器,在 8 张 H100(共 640 GB 显存) 上最多能训练一个 40B 参数规模的模型。
Tensor
介绍了一下tensor的基本用法:
x = torch.tensor([[1., 2, 3], [4, 5, 6]]) # @inspect x
x = torch.zeros(4, 8) # 4x8 matrix of all zeros @inspect x
x = torch.ones(4, 8) # 4x8 matrix of all ones @inspect x
x = torch.randn(4, 8) # 4x8 matrix of iid Normal(0, 1) samples @inspect x
x = torch.empty(4, 8) # 4x8 matrix of uninitialized values @inspect x
nn.init.trunc_normal_(x, mean=0, std=1, a=-2, b=2) # @inspect x
float32

单精度浮点数,他还开玩笑说在科学计算中不是双精度我不认的~
深度学习可以随意一点
x = torch.zeros(4, 8) # @inspect x
assert x.dtype == torch.float32 # Default type
assert x.numel() == 4 * 8
assert x.element_size() == 4 # Float is 4 bytes
assert get_memory_usage(x) == 4 * 8 * 4 # 128 bytes
float16
半精度浮点数
这里主要是说fp16的精度问题
x = torch.tensor([1e-8], dtype=torch.float16) # @inspect x
assert x == 0 # Underflow!
浮点数计算问题: 计算0.01的二进制表示
| 步骤 | 乘法 | 整数部分 | 小数部分 |
|---|---|---|---|
| 1 | 0.01 × 2 = 0.02 | 0 | 0.02 |
| 2 | 0.02 × 2 = 0.04 | 0 | 0.04 |
| 3 | 0.04 × 2 = 0.08 | 0 | 0.08 |
| 4 | 0.08 × 2 = 0.16 | 0 | 0.16 |
| 5 | 0.16 × 2 = 0.32 | 0 | 0.32 |
| 6 | 0.32 × 2 = 0.64 | 0 | 0.64 |
| 7 | 0.64 × 2 = 1.28 | 1 | 0.28 |
| 8 | 0.28 × 2 = 0.56 | 0 | 0.56 |
| 9 | 0.56 × 2 = 1.12 | 1 | 0.12 |
| 10 | 0.12 × 2 = 0.24 | 0 | 0.24 |
| …… | …… | …… | …… |
$ 0.01(10) ≈ 1.010 * 2^{-6} $
转成fp16就是
| 符号位 | 指数位 | 尾数位 |
|---|---|---|
| $0$ | $-6+15=9=001001$ | $010…$ |
补习
关于浮点数,还记得是上的李沁老师的课(他上课是我喜欢的风格直击问题,简练,不过我也是听左边忘右边)
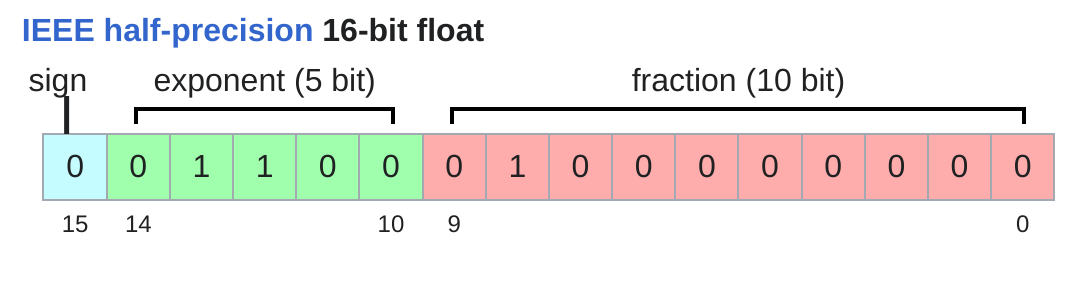
以float16为例:
| 符号位 | 指数位 | 尾数位 |
|---|---|---|
| 1比特位,0=正数,1=负数 | 5比特位,偏置15 | 10比特位 |
符号位没什么好说的
指数位
计算公式如下:
$bias=2^{k−1}−1=2^4−1=15$
为什么要偏置,是为了表示$2^{-4}$这种负指数
也就是说虽然指数位理论上可以达到$2^5=1+2+4+8+16=31$的值
但是实际正指数位只能到$31-1-15=15$
111111是特殊,表示 Inf 或 NaN
尾数位
主要是正规数
正规数
在 IEEE 754 浮点数标准中,正规数(normalized number)是指:
指数字段不全为 0(即指数 ≠ 0),并且隐含一个 前导 1 的浮点数。
说白了前面有个隐藏的1
总结
所以float16的数字大小范围就可以算出来:
最大值:
| 符号位 | 指数位 | 尾数位 |
|---|---|---|
| $0$ | $11110=30-15=15$ | $1111111111=2^{-1} + 2^{-2} + … + 2^{-10} = 1 - 2^{-10} = 1023/1024$ |
$等比数列求和公式:S_n=a_1⋅\frac{1−q^n}{1-q}$
- a1 为首项,
- q 为公比,
- n 为项数。
$尾数位=(1+(1−2^{−10})=2−2^{−10}$
$最大值=(2−2^{−10})×2^{15}$
最小值:
最小正规数:
| 符号位 | 指数位 | 尾数位 |
|---|---|---|
| $1$ | $00001=1-15=-14$ | $0000000000$ |
$最小正规正数=1.0×2^{−14}$
最小非正规数(表示更趋向于0的数):
| 符号位 | 指数位 | 尾数位 |
|---|---|---|
| 1 | $00000=0-15=-15$ | 0000000001 |
$最小非正规正数=2^{−10}×2^{−14}=2^{−24}$
bfloat16
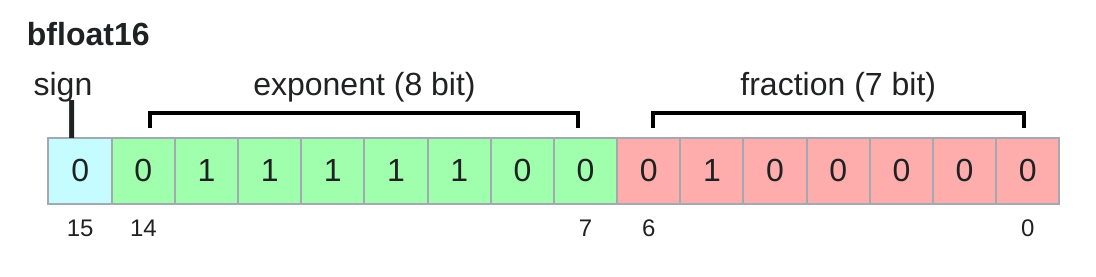
指数位和float32相同也就是说可以表示更接近于0的数了,精度有所下降,但是可以表示更小的数了,不至于让1.001变成1.000
也可以直接转成float32用于混合精度训练
fp8
nvidia提的
浮点数总结
总之不用FP32你会得到一个单词:instability不稳定的,因为会有下溢
tensor存储
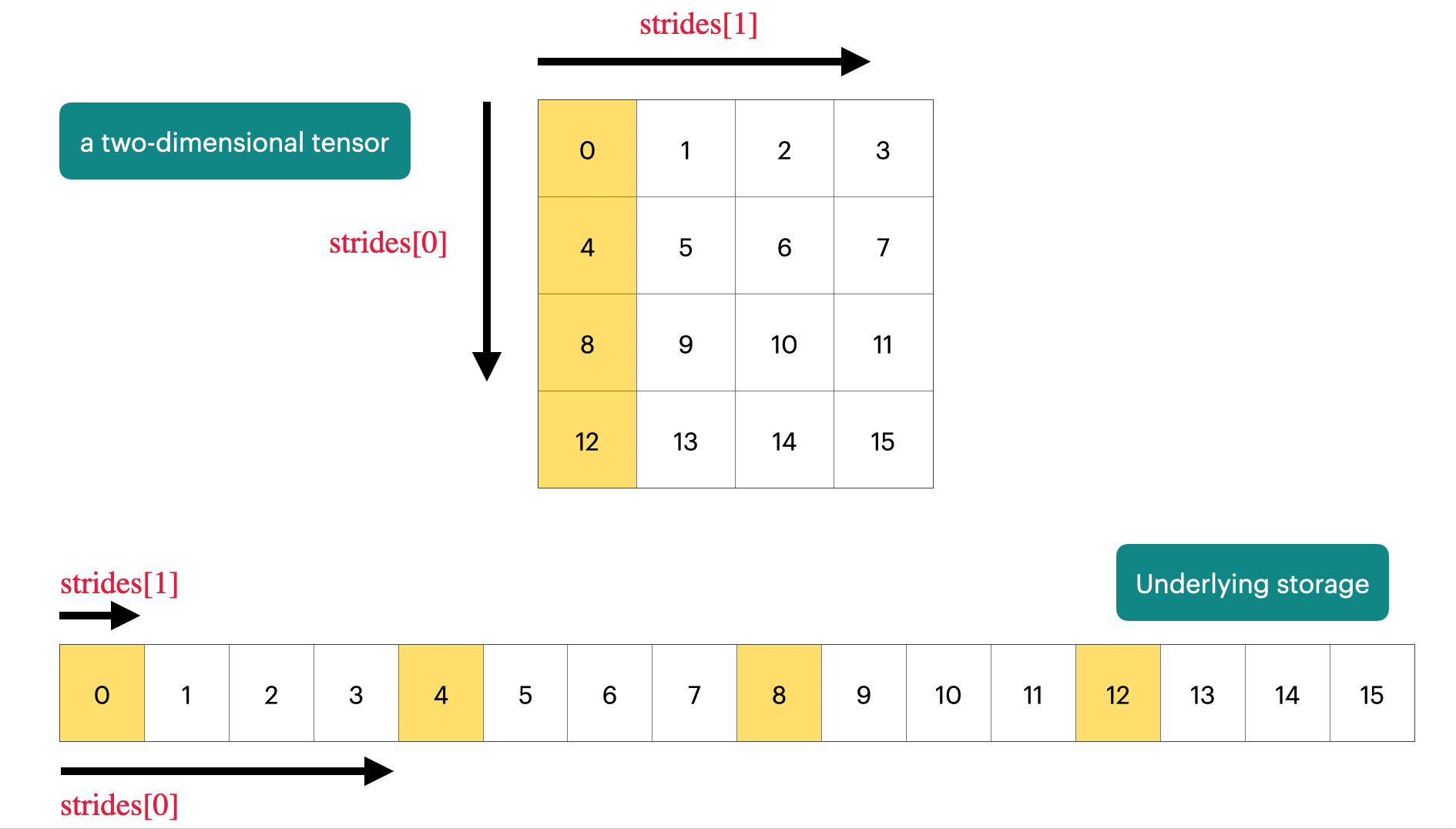
PyTorch 默认是 row-major (C-style) 连续存储,也就是最后一个维度在地址上是连续的。
然后很多切片操作和计算(原地计算)只是改变tensor的属性值没有改变内存地址
# Note that some views are non-contiguous entries, which means that further views aren't possible.
x = torch.tensor([[1., 2, 3], [4, 5, 6]]) # @inspect x
y = x.transpose(1, 0) # @inspect y
assert not y.is_contiguous()
try:
y.view(2, 3)
assert False
except RuntimeError as e:
assert "view size is not compatible with input tensor's size and stride" in str(e)
这里是转置矩阵后内存还是按照顺序存的,访问顺序变了
y[0,0] -> 1
y[0,1] -> 4 (跳 3 个元素)
y[1,0] -> 2 (跳 1 个元素)
y[1,1] -> 5
...
可以用y.reshape(2, 3)或者 y = x.transpose(1, 0).contiguous().view(2, 3)
内存就变了不是一个地址了
矩阵乘法
行与列进行点积后的结果
x @ w = torch.matmul(x, w)
einops
爱因斯坦标示
x = torch.ones(2, 2, 3) # batch, sequence, hidden @inspect x
y = torch.ones(2, 2, 3) # batch, sequence, hidden @inspect y
z = x @ y.transpose(-2, -1) # batch, sequence, sequence @inspect z
# jaxtyping
x: Float[torch.Tensor, "batch seq1 hidden"] = torch.ones(2, 3, 4) # @inspect x
y: Float[torch.Tensor, "batch seq2 hidden"] = torch.ones(2, 3, 4) # @inspect y
z = einsum(x, y, "batch seq1 hidden, batch seq2 hidden -> batch seq1 seq2")
# Old way:
y = x.mean(dim=-1) # @inspect y
# New (einops) way:
y = reduce(x, "... hidden -> ...", "sum") # @inspect y
FLOP(floating-point operation)
-
FLOPs: floating-point operations (measure of computation done)浮点运算次数(衡量计算量的指标) -
FLOP/s: floating-point operations per second (also written asFLOPS), which is used to measure the speed of hardware.每秒浮点运算次数(也写作FLOPS),用于衡量硬件的速度。
小写s代表总次数(统计、总和),大写S代表每秒的计算次数(衡量单位、指标)
if torch.cuda.is_available():
B = 16384 # Number of points
D = 32768 # Dimension
K = 8192 # Number of outputs
else:
B = 1024
D = 256
K = 64
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x = torch.ones(B, D, device=device)
w = torch.randn(D, K, device=device)
y = x @ w
# FLOPs = B × K × (2D−1)讲道理是这么算的,加法应该少一次,可能是D比较大把1忽略了?
actual_num_flops = 2 * B * D * K # 8796093022208
MFU
torch.cuda.get_device_properties(device)
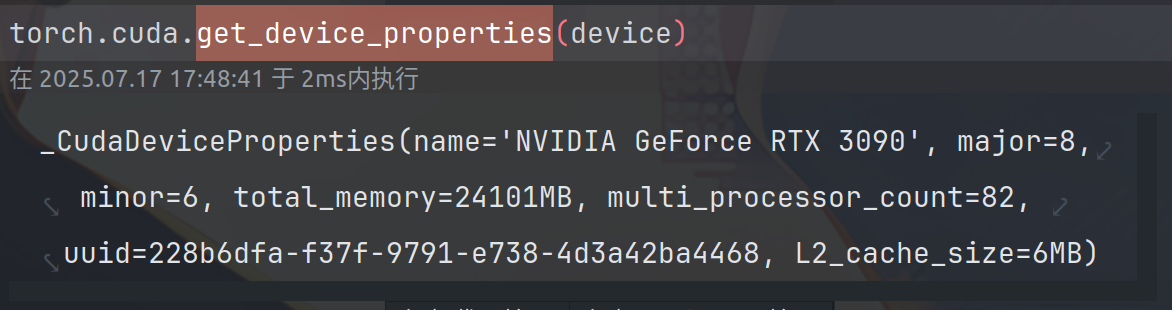
TF32 是 NVIDIA 为了加速训练在 Ampere 架构(如 A100)及以后推出的一种 权衡速度与精度的格式。尾数位只有10,后面位数全是0。
计算一下我3090实际的MFU
import timeit
def time_matmul(a: torch.Tensor, b: torch.Tensor) -> float:
"""Return the number of seconds required to perform `a @ b`."""
# Wait until previous CUDA threads are done
if torch.cuda.is_available():
torch.cuda.synchronize()
def run():
# Perform the operation
a @ b
# Wait until CUDA threads are done
if torch.cuda.is_available():
torch.cuda.synchronize()
# Time the operation `num_trials` times
num_trials = 5
total_time = timeit.timeit(run, number=num_trials)
return total_time / num_trials
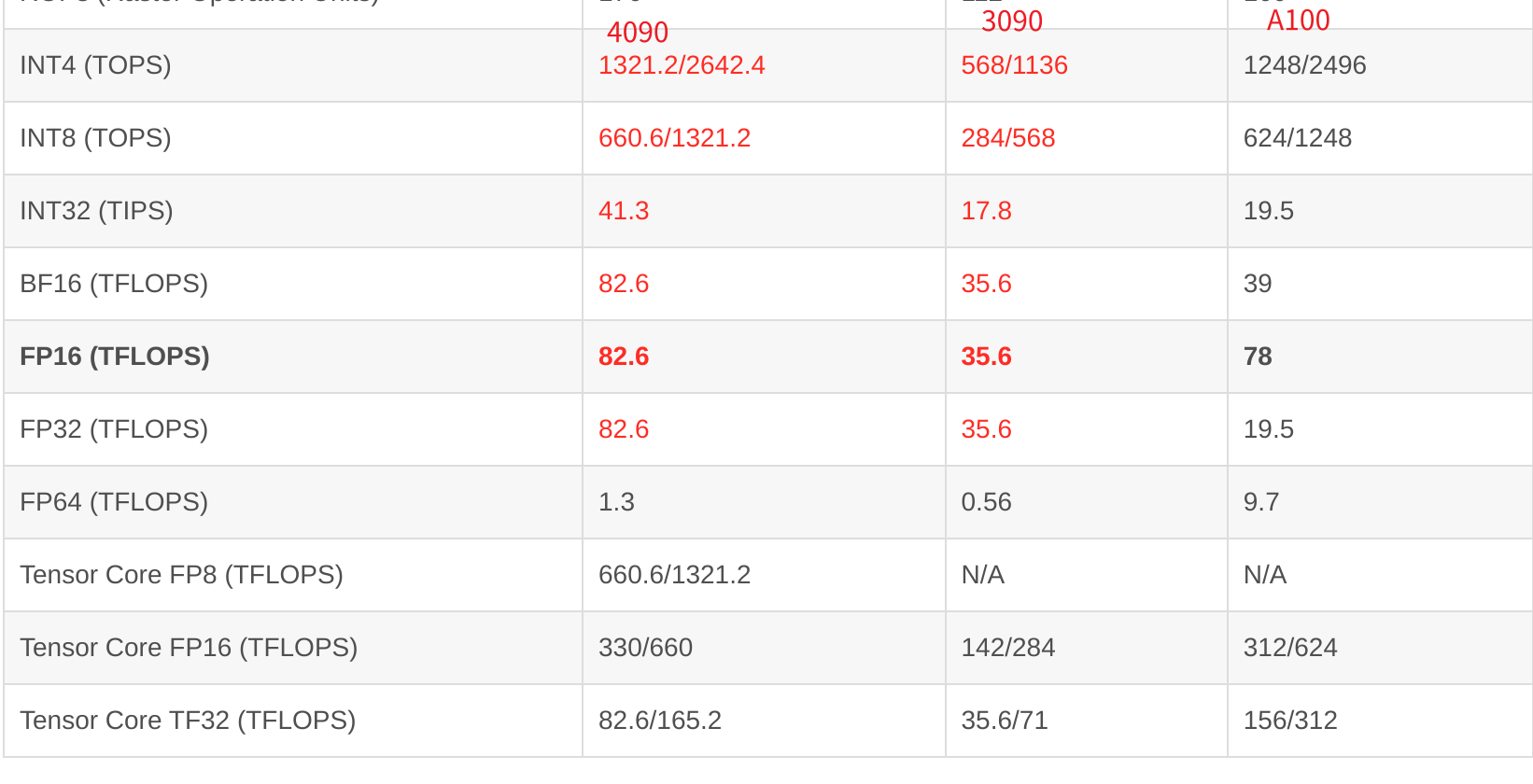
# 3090理论每秒FP32 FLOPS 35.6*e12
promised_flop_per_sec = 35.6e12
# 实际每秒
if torch.cuda.is_available():
B = 16384 # Number of points
D = 32768 # Dimension
K = 8192 # Number of outputs
else:
B = 1024
D = 256
K = 64
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x = torch.ones(B, D, device=device)
w = torch.randn(D, K, device=device)
y = x @ w
actual_num_flops = 2 * B * D * K
print("实际FLOPs:", actual_num_flops)
# 转成bfloat16
# x = x.to(torch.bfloat16)
# w = w.to(torch.bfloat16)
actual_time = time_matmul(x, w)
print("实际时间:", actual_time)
actual_flop_per_sec = actual_num_flops / actual_time
print("实际FLOPS:", actual_flop_per_sec)
mfu = actual_flop_per_sec / promised_flop_per_sec
print("MFU:", mfu)
这是默认的情况下:
- 实际FLOPs: 8796093022208
- 实际时间: 0.3723490708041936
- 实际FLOPS: 23623244186457.45
- MFU: 0.6635742749004901
BF16格式下:
- 实际FLOPs: 8796093022208
- 实际时间: 0.12506474698893727
- 实际FLOPS: 70332313733350.195
- MFU: 1.9756267902626459
这图片BF16的数据不对劲吧,MFU都1.97了,裂开
代码本地运行速度很明显BF16比FP32运行快多了
Gradient(backward)
# Forward pass: compute loss
x = torch.tensor([1., 2, 3])
w = torch.tensor([1., 1, 1], requires_grad=True)
y = x @ w
loss = 0.5 * (y - 5).pow(2)
# Backward pass: compute gradients
loss.backward()
print(w.grad) # tensor([1., 2., 3.])
∂loss/∂w = ∂loss/∂pred_y * ∂pred_y/∂w
∂loss/∂pred_y = (pred_y - 5) = 6 - 5 = 1
∂pred_y/∂w = x = [1, 2, 3]
因此:∂loss/∂w = 1 * [1, 2, 3] = [1, 2, 3]
计算梯度时的FLOPs
这里比较难理解啊
先贴一下原讲义(可以后面点开看):
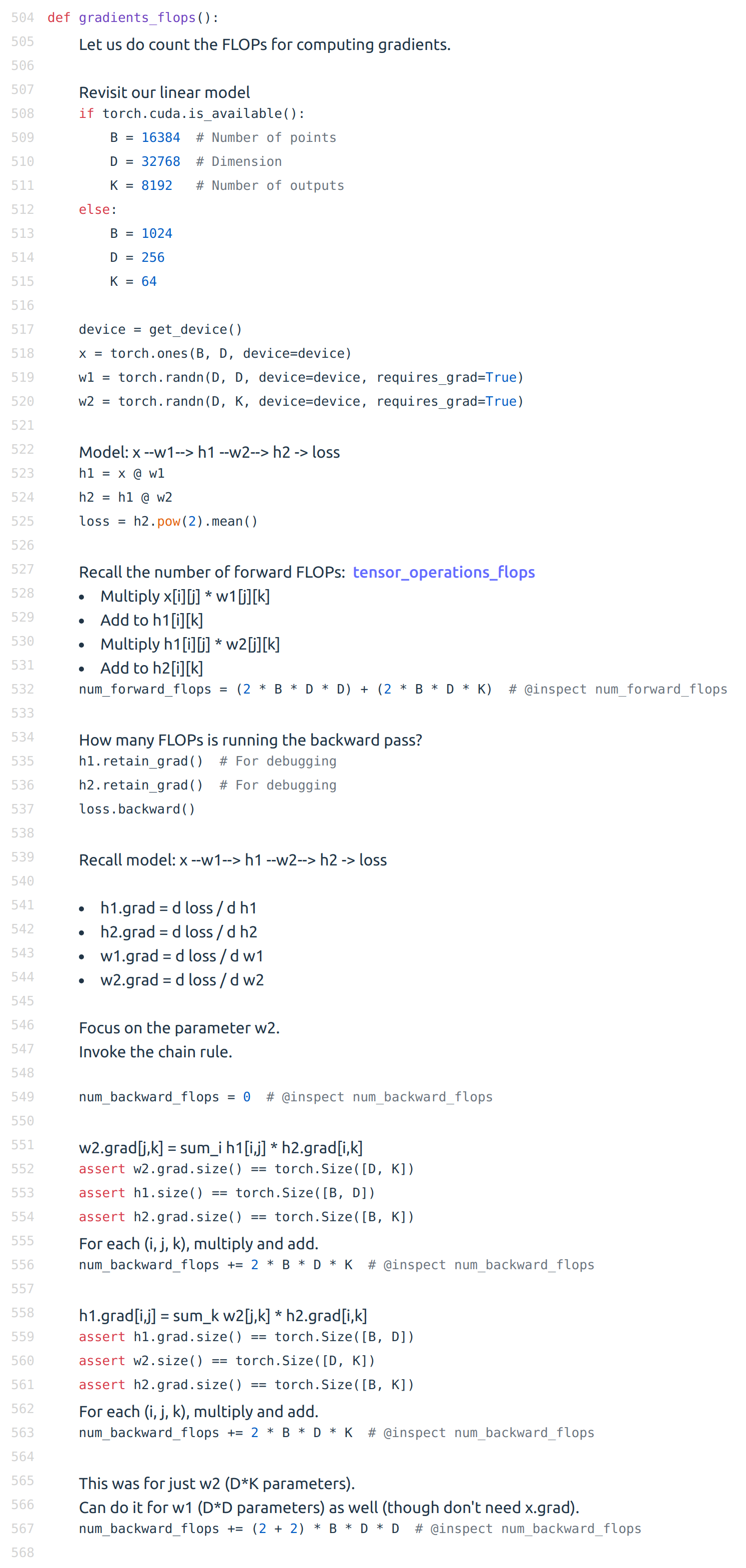
一开始的前向传播计算好理解点
从这开始How many FLOPs is running the backward pass?计算反向传播的FLOPs
这里写代码跑一遍
import torch
if torch.cuda.is_available():
B = 6192 # Number of points
D = 10240 # Dimension
K = 4096 # Number of outputs
else:
B = 1024
D = 256
K = 64
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x = torch.ones(B, D, device=device)
w1 = torch.randn(D, D, device=device, requires_grad=True)
w2 = torch.randn(D, K, device=device, requires_grad=True)
# 矩阵乘法 矩阵1:M*N 矩阵2: N*Q 算一个元素值乘法次数要 N次,加法要 N-1 次
# 总次数为 M * Q * (N + N -1) = M * Q * (2N - 1)
# 1可以忽略不计 所以是 2 * M * Q * N
h1 = x @ w1 # Size: B D * D D -> B D FLOPs: 2 * B * D * D
h2 = h1 @ w2 # Size: B D * D K -> B K FLOPs: 2 * B * D * K
loss = h2.pow(2).mean() # MSE 均方误差
num_forward_flops = (2 * B * D * D) + (2 * B * D * K)
print("Forward FLOPs:", num_forward_flops)
h1.retain_grad() # For debugging
h2.retain_grad() # For debugging
loss.backward()
# h1.grad = d loss / d h1
# h2.grad = d loss / d h2
# w1.grad = d loss / d w1
num_backward_flops = 0
# 计算w2的梯度:
# w2.grad = d loss / d w2 = d loss / d h2 * d h2 / d w2 = h2.grad * h1
# h2 第 i 行第 k 列的元素,由 h1 的第 i 行和 w2 的第 k 列相乘得到
# 所以:h2[i,k] = sum_j h1[i,j] * w2[j,k]
# 然后对w2求导:
# ∂h2[i,k]/∂w2[j,k] = h1[i,j]
# 下面做代换
# ∂loss/∂h2[i,k] = h2.grad[i,k]
# ∂loss/∂w2[j,k] = sum_i ∂loss/∂h2[i,k] * ∂h2[i,k]/∂w2[j,k]
# 得到:
# w2.grad[j,k] = ∂loss/∂w2[j,k] = sum_i h1[i,j] * h2.grad[i,k]
# 导数SIZE和本身是一样
assert w2.grad.size() == torch.Size([D, K])
# w2.grad[j,k] = sum_i h1[i,j] * h2.grad[i,k]
assert h1.size() == torch.Size([B, D])
assert h2.grad.size() == torch.Size([B, K])
# For each (i, j, k), multiply and add.
# 计算一次反向传播
num_backward_flops += 2 * B * D * K
print(num_backward_flops)
# h1.grad[i,j] = sum_k w2[j,k] * h2.grad[i,k]
assert h1.grad.size() == torch.Size([B, D])
assert w2.size() == torch.Size([D, K])
assert h2.grad.size() == torch.Size([B, K])
# For each (i, j, k), multiply and add.
num_backward_flops += 2 * B * D * K
print(num_backward_flops)
# This was for just w2 (D*K parameters).
# Can do it for w1 (D*D parameters) as well (though don't need x.grad).
num_backward_flops += (2 + 2) * B * D * D
print(num_backward_flops)
就是说反向传播计算梯度:要4 * B * D * K(自己算2 * B * D * K,传播给下面2 * B * D * K)加上前向就是 6 * B * D * K的FLOPs
A nice graphical visualization:
Putting it togther:
Forward pass: 2 (# data points) (# parameters) FLOPs
Backward pass: 4 (# data points) (# parameters) FLOPs
Total: 6 (# data points) (# parameters) FLOPs
这里Callback开头的(为什么是6)
Model
模型参数
import torch
from torch import nn
input_dim = 16384
output_dim = 32
w = nn.Parameter(torch.randn(input_dim, output_dim))
assert isinstance(w, torch.Tensor) # Behaves like a tensor
assert type(w.data) == torch.Tensor # Access the underlying tensor
x = nn.Parameter(torch.randn(input_dim))
output = x @ w
assert output.size() == torch.Size([output_dim])
# output值:输出值在~sqrt(16384) ≈ ±128范围 标准正态分布
tensor([ 164.4998, -175.6749, -56.8557, -105.4998, -236.2094, -31.9990,
-162.7417, 118.6591, -34.7936, 153.1620, -179.9156, 54.2254,
165.4161, -266.0403, -47.7279, 33.3281, 93.2577, 24.5926,
-97.0982, -135.6569, -140.1329, -53.7529, -8.4854, -98.3632,
323.0457, -55.9706, -55.4370, 61.9023, 103.4207, 179.0014,
101.8132, -22.8997], grad_fn=<SqueezeBackward4>)
强调的是模型参数的初始化:
output值过大导致后面的梯度爆炸各种不稳定,所以就是缩放初始值
w = nn.Parameter(torch.randn(input_dim, output_dim) / np.sqrt(input_dim))
再进一步截断正态分布
# To be extra safe, we truncate the normal distribution to [-3, 3] to avoid any chance of outliers.
w = nn.Parameter(nn.init.trunc_normal_(torch.empty(input_dim, output_dim), std=1 / np.sqrt(input_dim), a=-3, b=3))
截断正态分布(Truncated Normal Distribution) ,目的是为了避免初始化中出现极端值(outliers),从而让训练更稳定。
提高神经网络训练的稳定性和收敛速度
自定义模型
import numpy as np
import torch
from torch import nn
def get_num_parameters(model: nn.Module) -> int:
return sum(param.numel() for param in model.parameters())
class Cruncher(nn.Module):
def __init__(self, dim: int, num_layers: int):
super().__init__()
self.layers = nn.ModuleList([
Linear(dim, dim)
for i in range(num_layers)
])
self.final = Linear(dim, 1)
def forward(self, x: torch.Tensor) -> torch.Tensor:
# Apply linear layers
B, D = x.size()
for layer in self.layers:
x = layer(x)
# Apply final head
x = self.final(x)
assert x.size() == torch.Size([B, 1])
# Remove the last dimension
x = x.squeeze(-1)
assert x.size() == torch.Size([B])
return x
class Linear(nn.Module):
"""Simple linear layer."""
def __init__(self, input_dim: int, output_dim: int):
super().__init__()
self.weight = nn.Parameter(torch.randn(input_dim, output_dim) / np.sqrt(input_dim))
def forward(self, x: torch.Tensor) -> torch.Tensor:
return x @ self.weight
D = 64 # Dimension
num_layers = 2
model = Cruncher(dim=D, num_layers=num_layers)
param_sizes = [
(name, param.numel())
for name, param in model.state_dict().items()
]
print(param_sizes)
assert param_sizes == [
("layers.0.weight", D * D),
("layers.1.weight", D * D),
("final.weight", D),
]
num_parameters = get_num_parameters(model)
print(num_parameters)
assert num_parameters == (D * D) + (D * D) + D
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = model.to(device)
B = 8 # Batch size
x = torch.randn(B, D, device=device)
y = model(x)
print(y)
assert y.size() == torch.Size([B])
输出:
[('layers.0.weight', 4096), ('layers.1.weight', 4096), ('final.weight', 64)]
8256
tensor([ 0.4874, 0.7666, 0.7967, -0.1383, 2.1578, -0.9054, 0.5778, -1.0364],
device='cuda:0', grad_fn=<SqueezeBackward1>)
随机
同步随机种子
# Torch
seed = 0
torch.manual_seed(seed)
# NumPy
import numpy as np
np.random.seed(seed)
# Python
import random
random.seed(seed)
数据加载
懒加载
orig_data = np.array([1, 2, 3, 4, 5, 6, 7, 8, 9, 10], dtype=np.int32)
orig_data.tofile("data.npy")
data = np.memmap("data.npy", dtype=np.int32)
assert np.array_equal(data, orig_data)
Pinned memory
固定内存
if torch.cuda.is_available():
x = x.pin_memory()
This allows us to copy
xfrom CPU into GPU asynchronously.
- x = x.to(device, non_blocking=True)
This allows us to do two things in parallel (not done here):
- Fetch the next batch of data into CPU
- Process
xon the GPU
优化器 - optimizer
Let’s define the AdaGrad optimize
momentum = SGD + exponential averaging of gradAdaGrad = SGD + averaging by grad^2RMSProp = AdaGrad + exponentially averaging of grad^2Adam = RMSProp + momentum
AdaGrad: https://www.jmlr.org/papers/volume12/duchi11a/duchi11a.pdf
from typing import Iterable
class AdaGrad(torch.optim.Optimizer):
def __init__(self, params: Iterable[nn.Parameter], lr: float = 0.01):
super(AdaGrad, self).__init__(params, dict(lr=lr))
def step(self):
for group in self.param_groups:
lr = group["lr"]
for p in group["params"]:
# Optimizer state
state = self.state[p]
grad = p.grad.data
# Get squared gradients g2 = sum_{i<t} g_i^2
g2 = state.get("g2", torch.zeros_like(grad))
# Update optimizer state
g2 += torch.square(grad)
state["g2"] = g2
# Update parameters
p.data -= lr * grad / torch.sqrt(g2 + 1e-5)
B = 2
D = 4
num_layers = 2
model = Cruncher(dim=D, num_layers=num_layers)
optimizer = AdaGrad(model.parameters(), lr=0.01)
model.to(device)
model.state_dict()
# 参数
OrderedDict([('layers.0.weight',
tensor([[ 0.0738, 0.0796, 0.7888, 0.2291],
[-0.5016, -0.6035, -0.7239, -0.5630],
[ 0.6271, 0.5637, -0.5113, -0.5344],
[ 0.4712, -0.3981, 0.1651, 0.3281]], device='cuda:0')),
('layers.1.weight',
tensor([[ 0.0183, -0.0411, 0.4005, -0.6554],
[-0.7396, -0.9855, 0.0469, -0.6268],
[-0.0726, -0.3529, 0.0033, 0.3119],
[-0.1595, 0.3192, 0.0668, -1.0775]], device='cuda:0')),
('final.weight',
tensor([[ 0.7161],
[-0.6522],
[-0.2452],
[ 0.0712]], device='cuda:0'))])
import torch.nn.functional as F
x = torch.randn(B, D, device=device)
y = torch.tensor([4., 5.], device=device)
pred_y = model(x)
loss = F.mse_loss(input=pred_y, target=y)
loss.backward()
optimizer.step()
model.state_dict()
# 参数
OrderedDict([('layers.0.weight',
tensor([[ 0.0638, 0.0896, 0.7988, 0.2191],
[-0.5116, -0.5937, -0.7139, -0.5730],
[ 0.6171, 0.5737, -0.5013, -0.5444],
[ 0.4812, -0.4081, 0.1551, 0.3381]], device='cuda:0')),
('layers.1.weight',
tensor([[ 0.0083, -0.0311, 0.4105, -0.6653],
[-0.7296, -0.9955, 0.0369, -0.6168],
[-0.0826, -0.3429, 0.0132, 0.3026],
[-0.1695, 0.3292, 0.0768, -1.0875]], device='cuda:0')),
('final.weight',
tensor([[ 0.7061],
[-0.6622],
[-0.2552],
[ 0.0812]], device='cuda:0'))])
# Free up the memory (optional)
optimizer.zero_grad(set_to_none=True)
内存 - Memory
# Parameters
num_parameters = (D * D * num_layers) + D
print(num_parameters)
# Activations
num_activations = B * D * num_layers
print(num_activations)
# Gradients
num_gradients = num_parameters
print(num_gradients)
# Optimizer states
num_optimizer_states = num_parameters
print(num_optimizer_states)
# Putting it all together, assuming float32
total_memory = 4 * (num_parameters + num_activations + num_gradients + num_optimizer_states)
print(total_memory)
# FLOPs
flops = 6 * B * num_parameters
print(flops)
# results
36
16
36
36
496
432
训练循环 - Train Loop
class SGD(torch.optim.Optimizer):
def __init__(self, params: Iterable[nn.Parameter], lr: float = 0.01):
super(SGD, self).__init__(params, dict(lr=lr))
def step(self):
for group in self.param_groups:
lr = group["lr"]
for p in group["params"]:
grad = p.grad.data
p.data -= lr * grad
def get_device():
return torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def train(name: str, get_batch,
D: int, num_layers: int,
B: int, num_train_steps: int, lr: float):
model = Cruncher(dim=D, num_layers=0).to(get_device())
optimizer = SGD(model.parameters(), lr=0.01)
for t in range(num_train_steps):
# Get data
x, y = get_batch(B=B)
# Forward (compute loss)
pred_y = model(x)
loss = F.mse_loss(pred_y, y)
# Backward (compute gradients)
loss.backward()
# Update parameters
optimizer.step()
optimizer.zero_grad(set_to_none=True)
D = 16
true_w = torch.arange(D, dtype=torch.float32, device=get_device())
def get_batch(B: int) -> tuple[torch.Tensor, torch.Tensor]:
x = torch.randn(B, D).to(get_device())
true_y = x @ true_w
return (x, true_y)
print(get_batch(2))
train("simple", get_batch, D=D, num_layers=0, B=4, num_train_steps=10, lr=0.01)
train("simple", get_batch, D=D, num_layers=0, B=4, num_train_steps=10, lr=0.1)
ckpt - checkpoint
Training language models take a long time and certainly will certainly crash.
certainly will:当然会,势必
model = Cruncher(dim=64, num_layers=3).to(get_device())
optimizer = AdaGrad(model.parameters(), lr=0.01)
checkpoint = {
"model": model.state_dict(),
"optimizer": optimizer.state_dict(),
}
# Save the checkpoint:
torch.save(checkpoint, "model_checkpoint.pt")
# Load the checkpoint:
loaded_checkpoint = torch.load("model_checkpoint.pt")
mixed_precision_training
混合精度训练
A concrete plan:
- Use {bfloat16, fp8} for the forward pass (activations).
- Use float32 for the rest (parameters, gradients).
tradeoffs:权衡取舍